Traslación, Escalación, Rotación, Sesgado
Traslación
En geometría, una traslación es una isometría en el espacio euclídeo caracterizada por un vector , tal que, a cada punto P de un objeto o figura se le hace corresponder otro punto P' , tal que:1


definición de traslaciones
Las traslaciones pueden entenderse como movimientos directos sin cambios de orientación, es decir, mantienen la forma y el tamaño de las figuras u objetos trasladados, a las cuales deslizan según el vector. Dado el carácter de isometría para cualquier punto P y Q se cumple la siguiente identidad entre distancias:

Más aún se cumple que:

Notas:
- La figura trasladada es idéntica a la figura inicial.
- La figura trasladada conserva la orientación que la figura original.
Representación matricial
Puesto que una traslación es un caso particular de transformación afín pero no una transformación lineal, generalmente se usan coordenadas homogéneas para representar la traslación mediante una matriz y poder así expresarla como una transformación lineal sobre un espacio de dimensión superior.
Así un vector tridimensional v = (vx, vy, vz) puede ser reescrito usando cuatro coordenadas homogéneas como v = (vx, vy, vz, 1). En esas condiciones una traslación puede ser representada por una matriz como:

Ya que como puede verse, la multiplicación de esta matriz por la representación en coordenadas homogéneas de un vector da lugar al resultado esperado:

La inversa de una matriz de traslación puede obtenerse cambiando el signo de la dirección del vector desplazamiento

Similarmente, el producto de dos matrices de traslación viene dado por:

Debido a que la suma de vectores es conmutativa, la multiplicación de matrices de traslación es también conmutativa, a diferencia de lo que sucede con matrices arbitrarias, que no necesariamente representan traslaciones.
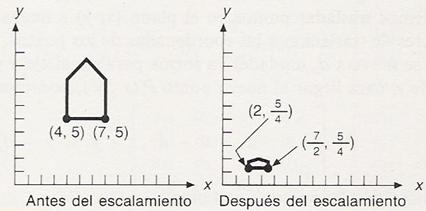
Escalación
La transformación de la escalación altera el tamaño del objeto, esto lo hace escalando
cada uno de sus coordenadas con respecto al origen del eje de coordenadas
Definiendo las coordenadas
x′= x*Sx y′= y*Sy
Sx es la escala en la dirección en x y Sy es la escala en la dirección en y.

donde los parámetros de escalación Sx y Sy se asignan cualesquiera valores positivos.
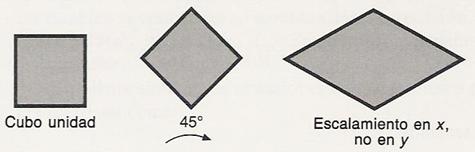
Escalamiento en cualquier dirección
Los parámetros Sx y Sy escalan un objeto en las direcciones x e y respectivamente.
Se puede escalar un objeto en otra dirección, rotando el objeto y alineándolo con el sistema de coordenadas y luego rotándolo en sentido inverso.
Descrito en la siguiente imagen con su respectiva ecuación:
Los parámetros Sx y Sy escalan un objeto en las direcciones x e y respectivamente.
Se puede escalar un objeto en otra dirección, rotando el objeto y alineándolo con el sistema de coordenadas y luego rotándolo en sentido inverso.
Descrito en la siguiente imagen con su respectiva ecuación:

Al escalar cualquier objeto dentro del mundo virtual se debe considerar lo siguientes puntos:
• Si el origen de coordenadas no se encuentra en el interior del objeto, se produce un desplazamiento
Para evitarlo, se usa un punto fijo, y se escala a partir de él. El punto fijo podría ser el centro del objeto, o uno de sus vértices, o también un punto arbitrario.
• Para escalar líneas rectas escalamos sólo sus extremos
• Para escalar polígonos, escalamos sólo sus vértices y redibujamos.
Rotación
En rotación, la orientación de ésta puede ser especificada en una variedad de formas, lo que se
explica a continuación es la rotación de un punto con respecto a los ejes fijos. Un eje de
rotación define el polo sobre el cual se va a rotar, como los polos Norte y Sur de la Tierra.
x = r cos teta
y = r sen teta
Rotación alrededor de un punto
Para hacer una rotación general, podemos hacerlo mediante una composición de
transformaciones básicas.
• Para escalar polígonos, escalamos sólo sus vértices y redibujamos.
Rotación
En rotación, la orientación de ésta puede ser especificada en una variedad de formas, lo que se
explica a continuación es la rotación de un punto con respecto a los ejes fijos. Un eje de
rotación define el polo sobre el cual se va a rotar, como los polos Norte y Sur de la Tierra.
x = r cos teta
y = r sen teta
Rotación alrededor de un punto
Para hacer una rotación general, podemos hacerlo mediante una composición de
transformaciones básicas.
Para generar una rotación se especifica un ángulo de rotación θ y laposición (xr, yr) del punto de rotación (punto pivote) acerca del cual el objeto se rota.
Valores positivos del ángulo de rotación definen una rotación en contra de las agujas del reloj y lo contrario para un ángulo negativo.
En representacion matricial:P′= R*P
Valores positivos del ángulo de rotación definen una rotación en contra de las agujas del reloj y lo contrario para un ángulo negativo.
En representacion matricial:P′= R*P

sesgado

{kind=link}
{kind=link}
Comentarios
Publicar un comentario